From video to 3D model automatically
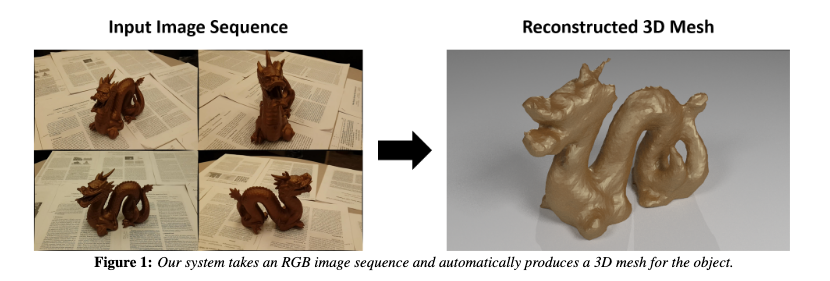
During my time working in the UIUC Vision Group with Prof. Hoiem I worked on 3DFS (Deformable Dense Depth Fusion and Segmentation). 3DFS is a 3D reconstruction and segmentation system from standard video.
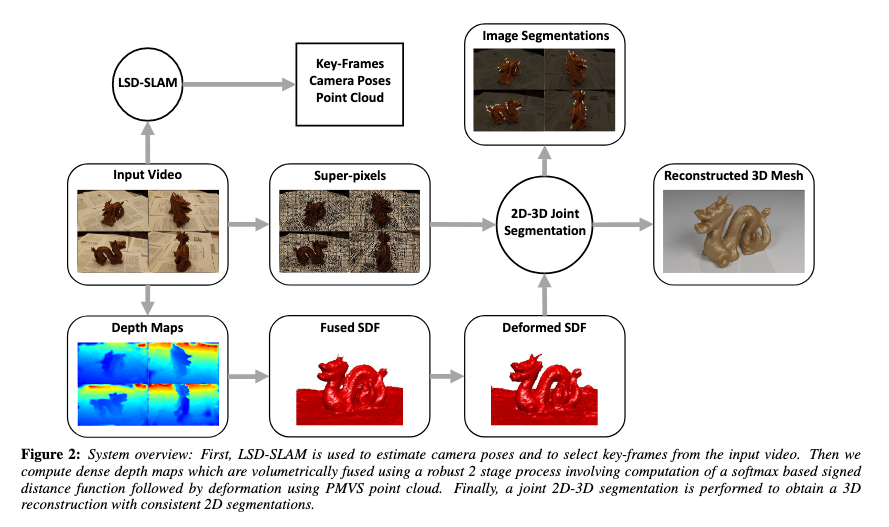
The processing stages of 3DFS in order to go from video to object reconstruction and segmentation masks
Users can take a video filming different angles of an object, 3DFS then goes through four stages. First it uses LSD-SLAM to estimate camera poses in the video, select key frames, and produce semi-dense depth maps. Then 3DFS conducts surface modeling to estimate dense depth maps. Next the depth maps are volumetrically fused to create a function field that describes for each voxel the distance to the nearest surface. Because there is a bias in the initial fusing, using the estimated camera poses and key frames from LSD-SLAM, we apply the Patch Based Multiview Stereo method which is able to generate an accurate sparse point cloud of the surface of object and use that point cloud to refine the function field. Finally 3DFS conducts a joint segmentation of all the key frames and the voxel map using graph cuts. This gives us both the refined object reconstruction and segmentation masks for the object.
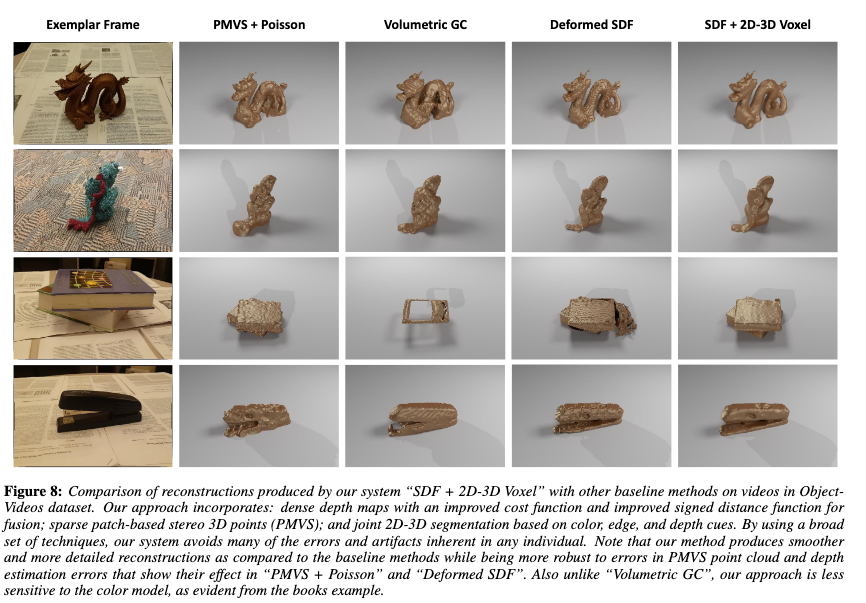
Reconstruction results (SDF + 2D-3D Voxel) compared against other methods
The reconstructions are pretty good and unlike other methods that are highly choreographed, with highly constrained filming conditions and using complex equipment or targeting easier to models objects to satisfy assumptions, 3DFS can be used by someone with their smartphone in standard lighting conditions and is robust to material characteristics like low surface texture, complex shapes, and specular materials.
There are some limitations however. The main source of error in the system is the camera pose estimation from LSD SLAM which effects both the construction of the depth maps and the accuracy of the PMVS point clouds. This is caused by significant occlusion or changes in lighting mid video. There also may be errors due to the handheld nature of the video including out of focus frames. Also though 3DFS does better than other methods when it comes to low surface texture and specularity, the errors from these material characteristics still do effect reconstruction. These issues make it harder to model very flat objects for instance. This method is also mostly targeted at small objects and so the choice of using a discreet voxel grid may hamper scalability to much larger objects and we also assume that objects are on a flat planar surface so some amount of staging is required by the user. Finally our method still fails to recover small geometric details which is still an open research problem.
There are cool applications for this technology. It enables almost anyone to become a 3D modeler without needing to know CAD or modeling tools. This could let animators more quickly create 3D assets for films and games. It could be applied in the world of augmented reality, letting people quickly move objects into the virtual world. One of most fun applications to me is the potential to be able to quickly scan an object with your phone and then 3D print it right then and there, an easy way to clone objects in the real world.
You can read the full paper on 3DFS here: https://arxiv.org/pdf/1606.05002.pdf